Left-Hand Mode | Right-Hand Mode | Two-Hand Mode
(the same HOVER policy under different control modes)
Head Mode | H2O Mode | OmniH2O Mode
(the same HOVER policy under different control modes)
H2O Mode | OmniH2O Mode | ExBody Mode | HumanPlus Mode
(the same HOVER policy under different control modes)
HumanPlus Mode | ExBody Mode | OmniH2O Mode | H2O Mode
(the same HOVER policy under different control modes)
ExBody→H2O Swtich | HumanPlus→OmniH2O Swtich | RootVel→RootPitch Swtich
(the same HOVER policy under different control modes)
Head Mode | Left-Hand Mode | Right-Hand Mode | Two-Hand Mode | Root-Velocity Mode
(the same HOVER policy under different control modes)
Method
Training Framework
The HOVER policy is distilled from the Oracle policy through proprioception and command masking. The task commands for the student are determined via mode-specific and sparsity-based masks, applied to both upper and lower body motions independently. These masks generate diverse task command modes, refining the student's inputs. The distillation employs DAgger to align the student’s actions with those of the oracle, optimizing through supervised learning on the oracle’s actions.
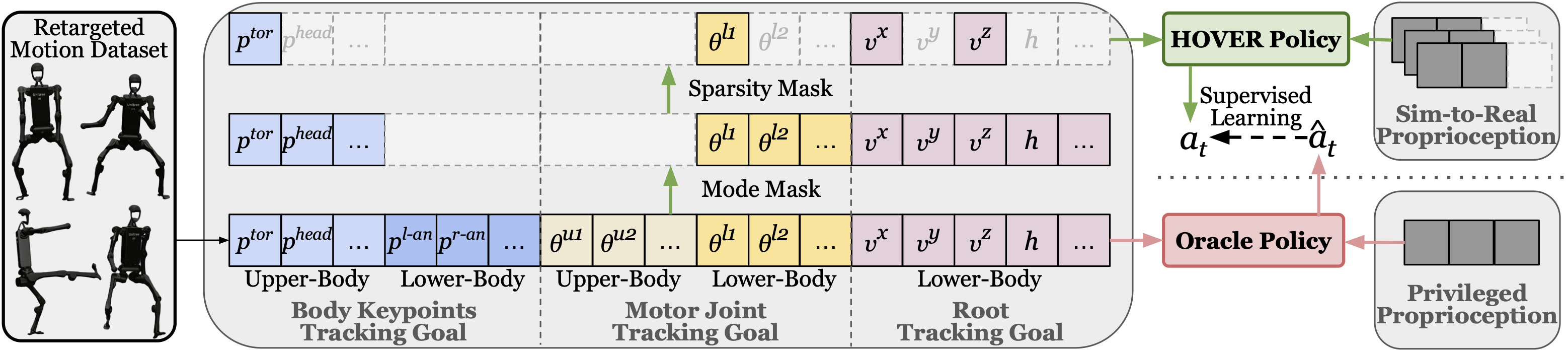
Deployment Framework
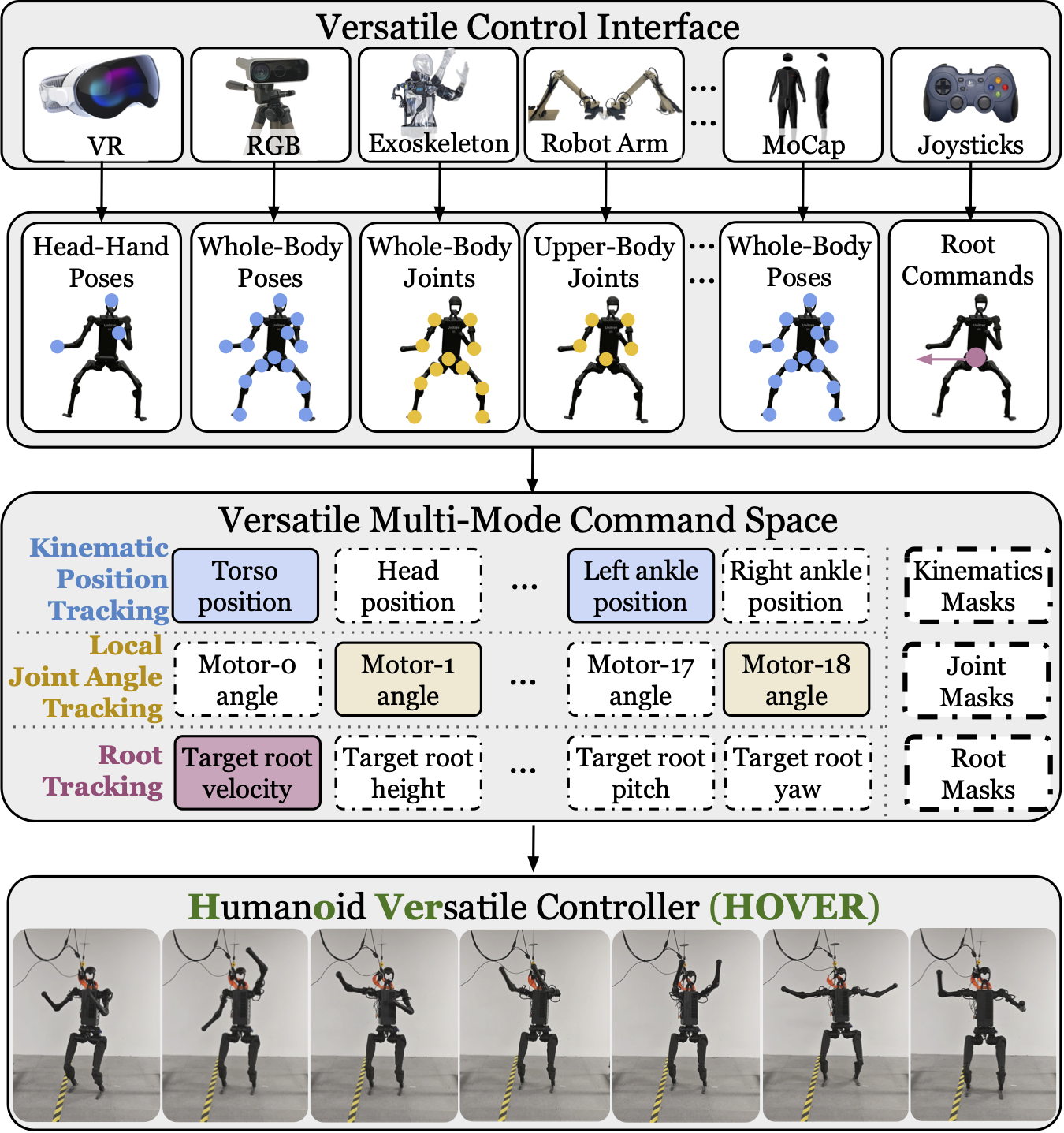
HOVER enables versatile humanoid control with a unified multi-mode command space. The versatile multi-mode command space supports
kinematic position tracking (blue),
local joint angle tracking (yellow), and
root tracking (purple). Highlighted boxes indicate active commands being tracked, while the masks (dashed boxes on the right) allow selective activation of different command spaces to accommodate various tasks.
BibTeX
@article{he2024hover,
title={HOVER: Versatile Neural Whole-Body Controller for Humanoid Robots},
author={He, Tairan and Xiao, Wenli and Lin, Toru and Luo, Zhengyi and Xu, Zhenjia and Jiang, Zhenyu and Liu, Changliu and Shi, Guanya and Wang, Xiaolong and Fan, Linxi and Zhu, Yuke},
journal={arXiv preprint arXiv:2410.21229},
year={2024}
}
Head Mode | H2O Mode | OmniH2O Mode
(the same HOVER policy under different control modes)
H2O Mode | OmniH2O Mode | ExBody Mode | HumanPlus Mode
(the same HOVER policy under different control modes)
HumanPlus Mode | ExBody Mode | OmniH2O Mode | H2O Mode
(the same HOVER policy under different control modes)
ExBody→H2O Swtich | HumanPlus→OmniH2O Swtich | RootVel→RootPitch Swtich
(the same HOVER policy under different control modes)
Head Mode | Left-Hand Mode | Right-Hand Mode | Two-Hand Mode | Root-Velocity Mode
(the same HOVER policy under different control modes)
Method
Training Framework
The HOVER policy is distilled from the Oracle policy through proprioception and command masking. The task commands for the student are determined via mode-specific and sparsity-based masks, applied to both upper and lower body motions independently. These masks generate diverse task command modes, refining the student's inputs. The distillation employs DAgger to align the student’s actions with those of the oracle, optimizing through supervised learning on the oracle’s actions.
Deployment Framework
HOVER enables versatile humanoid control with a unified multi-mode command space. The versatile multi-mode command space supports
kinematic position tracking (blue),
local joint angle tracking (yellow), and
root tracking (purple). Highlighted boxes indicate active commands being tracked, while the masks (dashed boxes on the right) allow selective activation of different command spaces to accommodate various tasks.
BibTeX
@article{he2024hover,
title={HOVER: Versatile Neural Whole-Body Controller for Humanoid Robots},
author={He, Tairan and Xiao, Wenli and Lin, Toru and Luo, Zhengyi and Xu, Zhenjia and Jiang, Zhenyu and Liu, Changliu and Shi, Guanya and Wang, Xiaolong and Fan, Linxi and Zhu, Yuke},
journal={arXiv preprint arXiv:2410.21229},
year={2024}
}
Head Mode | Left-Hand Mode | Right-Hand Mode | Two-Hand Mode | Root-Velocity Mode
(the same HOVER policy under different control modes)
Method
Training Framework
The HOVER policy is distilled from the Oracle policy through proprioception and command masking. The task commands for the student are determined via mode-specific and sparsity-based masks, applied to both upper and lower body motions independently. These masks generate diverse task command modes, refining the student's inputs. The distillation employs DAgger to align the student’s actions with those of the oracle, optimizing through supervised learning on the oracle’s actions.
Deployment Framework
HOVER enables versatile humanoid control with a unified multi-mode command space. The versatile multi-mode command space supports kinematic position tracking (blue), local joint angle tracking (yellow), and root tracking (purple). Highlighted boxes indicate active commands being tracked, while the masks (dashed boxes on the right) allow selective activation of different command spaces to accommodate various tasks.
BibTeX
@article{he2024hover,
title={HOVER: Versatile Neural Whole-Body Controller for Humanoid Robots},
author={He, Tairan and Xiao, Wenli and Lin, Toru and Luo, Zhengyi and Xu, Zhenjia and Jiang, Zhenyu and Liu, Changliu and Shi, Guanya and Wang, Xiaolong and Fan, Linxi and Zhu, Yuke},
journal={arXiv preprint arXiv:2410.21229},
year={2024}
}